

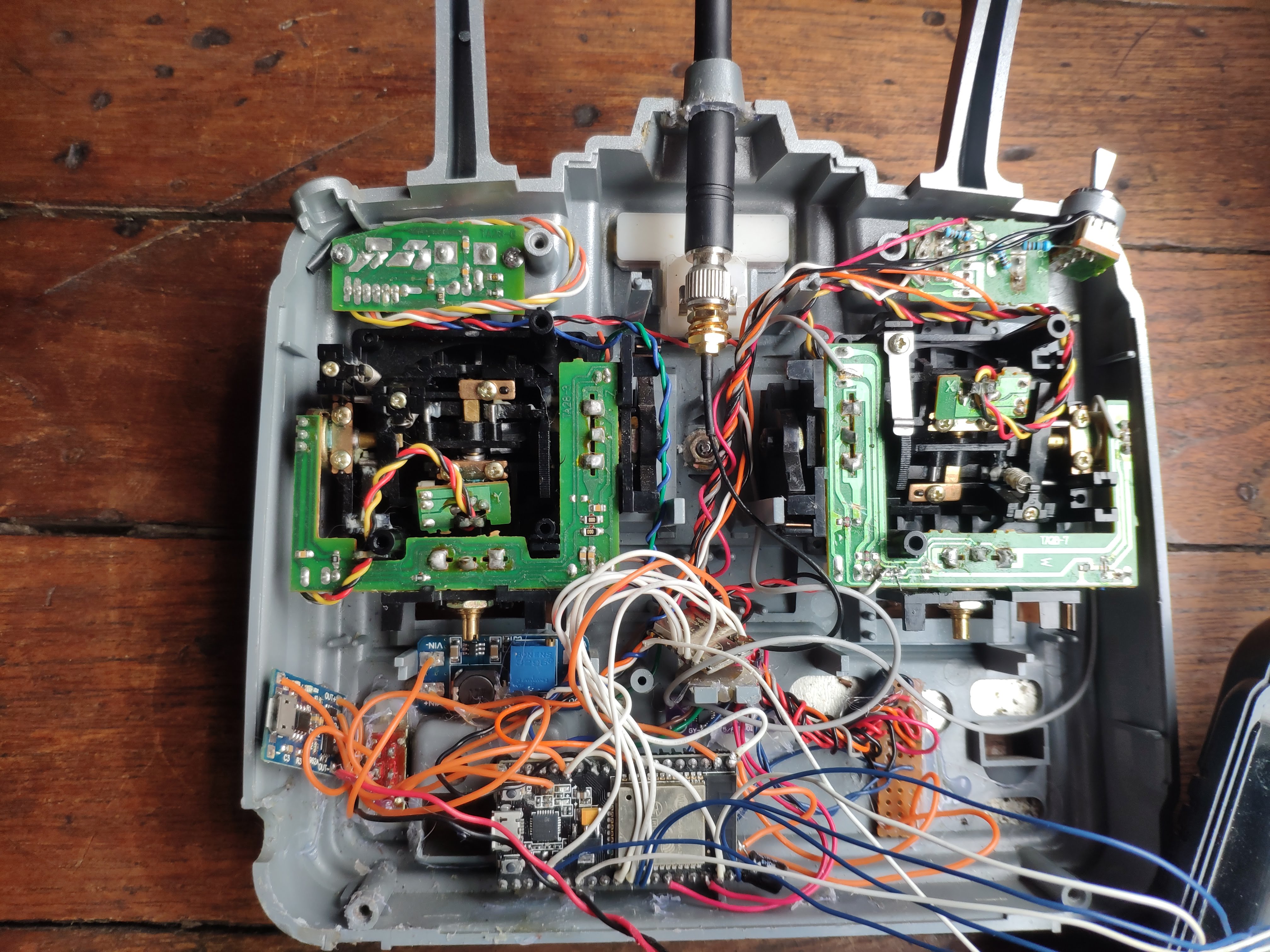
I started building a drone as a Gold DofE project to develop my engineering skills during school. Since then I developed multiple versions of this drone starting with a fully custom 3D printed frame, using an arduino flight controller running a few PID loops to control the roll, pitch and yaw. The transmitter I built for this version used a single WiFi transeiver featuring high data speeds but poor signal strength. When this version away from me after loosing connection and crashed, I began an improved version using carbon fiber spars.
The latest version of my drone used a commercial flight controller but kept the custom transeiver, to which I added a long range transeiver in addition to the old WiFi module to boost signal integrity. Overall the drone could lift a 2kg load with a flight time of 30 minutes thanks to the cutom Li-ion battery bank and carbon fibre frame.
